摘 要:車輛定位中利用多傳感器信息融合技術(shù)可以提高定位精度。 系統(tǒng)中的傳感器數(shù)量急劇增加,傳統(tǒng)儀器很難滿足整個(gè)系統(tǒng)的測量需求。 本文開發(fā)了一種基于虛擬儀器軟件開發(fā)環(huán)境LabVIEW的多傳感器信息采集平臺,將多傳感器數(shù)據(jù)采集、預(yù)處理、信息顯示、存儲及數(shù)據(jù)回放集成在一起,解決了以往實(shí)現(xiàn)多傳感器信息同步十分困難的問題,為將來進(jìn)一步研究利用虛擬儀器測量多傳感器信息及進(jìn)行多傳感器信息融合奠定了基礎(chǔ)。
關(guān)鍵詞:LabVIEW;數(shù)據(jù)采集;全球定位系統(tǒng);慣性測量單元
引 言
車輛定位導(dǎo)航技術(shù)是智能交通系統(tǒng)( ITS)中一個(gè)重要技術(shù),而定位精度、定位數(shù)據(jù)的連續(xù)性和可靠性是導(dǎo)航系統(tǒng)性能的三個(gè)重要因素。 車輛定位導(dǎo)航的精度直接取決于各個(gè)傳感器的精度,而傳感器精度的提高往往受技術(shù)、價(jià)格等因素的影響。 目前廣泛采用的基于多傳感器融合的組合導(dǎo)航系統(tǒng),能夠有效提高導(dǎo)航定位精度,增強(qiáng)導(dǎo)航系統(tǒng)的可靠性,進(jìn)而充分保證導(dǎo)航數(shù)據(jù)的連續(xù)性和可用性。 傳感器數(shù)量在系統(tǒng)中的需求增加,傳統(tǒng)儀器不再適應(yīng)系統(tǒng)要求。本文作者利用NI公司的虛擬儀器編程軟件LabVIEW所設(shè)計(jì)的多傳感器信息采集平臺,為組合導(dǎo)航中的多傳感器信息采集工作提供了一個(gè)通用的平臺,克服了傳統(tǒng)儀器功能單一,靈活性差,更新和維護(hù)費(fèi)用高的缺點(diǎn)。 并且將數(shù)據(jù)采集、預(yù)處理、信息顯示、存儲和回放集成在一起,形成統(tǒng)一格式的數(shù)據(jù)文件,方便與其它數(shù)據(jù)分析軟件的接口,例如與Matlab的接口。 在這個(gè)多傳感器信息采集平臺,各種傳感器信息可以顯示在同一界面上,可以很方便地在其它傳感器的信息中添加GPS時(shí)間信息,解決了以往實(shí)現(xiàn)多傳感器信息同步困難的問題。
軟件開發(fā)平臺LabVIEW及結(jié)構(gòu)
LabVIEW全稱是Laboratory Virtual InstrumentEngineering Workbench ,是目前十分流行的虛擬儀器的軟件開發(fā)平臺,是美國國家儀器公司(National INStrument) 推出的一種基于圖形開發(fā)、調(diào)試和運(yùn)行程序的集成化環(huán)境,是目前國際上唯一的編譯型的圖形化編程語言。
系統(tǒng)硬件結(jié)構(gòu)
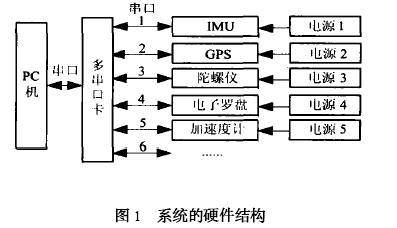
實(shí)現(xiàn)此平臺的硬件結(jié)構(gòu)如圖1所示。各種傳感器通過串行接口與計(jì)算機(jī)相連,實(shí)現(xiàn)與計(jì)算機(jī)的通信,計(jì)算機(jī)利用系統(tǒng)的LabVIEW程序?qū)Ω鞣N傳感器發(fā)送控制命令,多傳感器信息通過串口送入計(jì)算機(jī),供LabVIEW程序進(jìn)行數(shù)據(jù)的識別,讀取,存儲以及后處理工作。 各種傳感器信息分別通過各自接口與計(jì)算機(jī)通信之間是并行的。 由于實(shí)驗(yàn)室條件有限,多傳感器僅以IMU和GPS為例完成了系統(tǒng)的設(shè)計(jì)工作。
系統(tǒng)軟件結(jié)構(gòu)
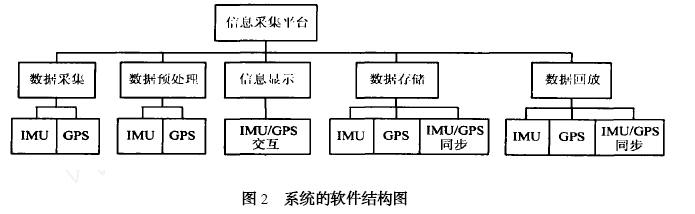
系統(tǒng)的軟件結(jié)構(gòu)圖如圖2 所示。 由圖2 可以看到,整個(gè)系統(tǒng)完成了GPS/IMU的數(shù)據(jù)采集、數(shù)據(jù)預(yù)處理、信息的同一界面顯示、數(shù)據(jù)存儲、數(shù)據(jù)回放的功能。
系統(tǒng)關(guān)鍵技術(shù)及其功能實(shí)現(xiàn)
系統(tǒng)關(guān)鍵技術(shù)
(1) LabVIEW的并行機(jī)制
LabVIEW軟件應(yīng)用程序采用了并行程序結(jié)構(gòu),分別實(shí)現(xiàn)對多傳感器信息的測控。 如在多任務(wù)并行處理中,兩個(gè)循環(huán)結(jié)構(gòu)構(gòu)成了兩個(gè)并行的任務(wù),每個(gè)任務(wù)體的執(zhí)行順序是互不相關(guān)的,甚至這兩個(gè)任務(wù)執(zhí)行的次數(shù)也是可以不一樣的。
(2) 串行口通信子VI
串行口通信的子VI針對計(jì)算機(jī)標(biāo)準(zhǔn)的串行口。LabVIEW提供了一組(共5 個(gè)) 串行口通信子VI控件來承擔(dān)對編程的支持,它們依次是:①串口初始化(Serial PorTInit) ; ②串口讀(Serial PortRead) ; ③串口寫(Serial PortWrite) ; ④串口字節(jié)數(shù)(ByteSatSerialPort) ; ⑤串口中斷(Serial PortBreak) 。
(3) 數(shù)據(jù)同步機(jī)制原理
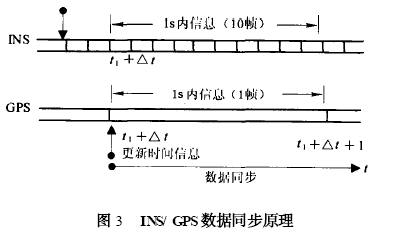
多傳感器信息融合中,要使誤差最小,兩個(gè)傳感器數(shù)據(jù)的時(shí)間應(yīng)該相匹配。 然而在實(shí)際的傳送到車輛中的基本定位信息只需要有限的時(shí)間信息,只要為傳感器信息確定數(shù)據(jù)起始時(shí)間,然后可以根據(jù)傳送的數(shù)據(jù)量以及通信波特率來確定時(shí)間。 以GPS信息與慣性導(dǎo)航系統(tǒng)( Inertial NavigATION System,INS) 的組合為例,由于INS與GPS的采樣率不同,INS采樣率一般為10 Hz ,而GPS的采樣率為1Hz。 如圖3 所示,設(shè)t1時(shí)刻為IMU/INS及GPS信息開始可用時(shí)刻,首先從t1開始向緩存器中存儲一系列的IMU/INS信息,由于GPS采樣率較低,此時(shí)的GPS信息可能并不是t1時(shí)刻而是前一秒內(nèi)的信息。 假設(shè)GPS信息在t1+Δt時(shí)刻更新,當(dāng)接收到GPS的t1+Δt時(shí)間信息后,將緩存器的信息恢復(fù)到正確的時(shí)間并完成更新,取t1+Δt為兩個(gè)傳感器的數(shù)據(jù)起始時(shí)間,這樣IMU/INS信息和GPS信息就達(dá)到了時(shí)間上的匹配,此后的時(shí)間信息就可以通過傳送的數(shù)據(jù)量以及通信波特率來確定。
系統(tǒng)功能實(shí)現(xiàn)
(1) 數(shù)據(jù)的采集和預(yù)處理
此部分將傳感器原始數(shù)據(jù)從串口連續(xù)正確地讀進(jìn)來之后,對數(shù)據(jù)進(jìn)行預(yù)處理,通過格式的轉(zhuǎn)換,數(shù)學(xué)計(jì)算等將原始數(shù)據(jù)轉(zhuǎn)換為傳感器實(shí)際測量信息,并實(shí)現(xiàn)了IMU轉(zhuǎn)動(dòng)角度的實(shí)時(shí)測量功能。 其基本原理就是將角速度進(jìn)行時(shí)間積分,得到角度的變化值。 由于陀螺儀在不同的溫度下有著不同程度的零點(diǎn)漂移,在積分的情況下其誤差就會(huì)不斷累加,所以在此模塊中特別增加了一個(gè)實(shí)時(shí)計(jì)算陀螺儀各軸方向靜止?fàn)顟B(tài)時(shí)平均漂移的子VI,用來對角速度積分的誤差進(jìn)行補(bǔ)償,從而得到比較準(zhǔn)確的角度變化值。下面以IMU為例,說明原始數(shù)據(jù)到實(shí)際測量值轉(zhuǎn)換的實(shí)現(xiàn)過程。每個(gè)IMU信息包含18個(gè)字節(jié)信息,其定義如表1所示。
表1 IMU18字節(jié)定位信息
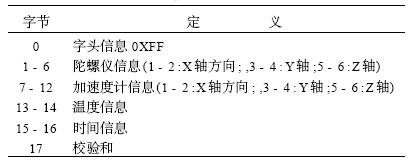
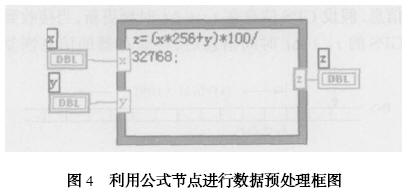
圖4 為利用公式節(jié)點(diǎn)進(jìn)行數(shù)據(jù)預(yù)處理框圖。 其中x 和y 是輸入的原始數(shù)據(jù),z 為輸出的實(shí)際測量值。 程序?qū)?8字節(jié)的字符串?dāng)?shù)據(jù)轉(zhuǎn)換為數(shù)字?jǐn)?shù)組后,在框圖上可直接在公式節(jié)點(diǎn)中輸入公式,完成原始信息到實(shí)際測量值的轉(zhuǎn)換。
(2) 信息顯示
軟件采用友好和直觀的界面呈現(xiàn)來自傳感器的信息,分別對來自GPS和IMU的數(shù)據(jù)信息進(jìn)行呈現(xiàn)。 其部分界面如圖5、圖6所示。
我們在設(shè)計(jì)過程中,特別采用了Tab控件,可以將IMU和GPS信息同時(shí)顯示在同一面板的不同分頁上,使我們能夠很方便地交互地察看兩個(gè)傳感器的信息。
圖5 IMU信息顯示界面
圖6 GPS信息顯示界面
(3) 數(shù)據(jù)存儲
在LabVIEW軟件平臺下,可以采用3種格式存儲數(shù)據(jù):文本文件,二進(jìn)制文件和數(shù)據(jù)記錄文件。數(shù)據(jù)存儲的功能由一個(gè)寫文件子VI和一個(gè)Case結(jié)構(gòu)構(gòu)成。 點(diǎn)擊前面板上的存儲控制按鈕時(shí),系統(tǒng)就會(huì)將IMU或者GPS數(shù)據(jù)進(jìn)行存儲,并且可以隨時(shí)終止存儲工作。 由于IMU信息中沒有實(shí)際時(shí)間信息,為了實(shí)現(xiàn)多傳感器信息的同步,以及存儲文件的后處理需要,特在IMU存儲信息中添加了同步的GPS時(shí)間信息。 為了方便用其它的程序來讀取數(shù)據(jù)進(jìn)行后處理工作,本文采用的是文本文件的
存儲格式。
(4) 數(shù)據(jù)回放
進(jìn)行數(shù)據(jù)的回放工作,首先要將文件按照其存儲格式識別出來,然后再將信息顯示在界面上。 由于LabVIEW對文件進(jìn)行讀取的函數(shù)不是很多,而且一般對文件格式的要求比較嚴(yán)格,所以,我們采取了一種方法,就是先將文件中所有的字符串讀出來,然后再利用LabVIEW中豐富的字符串操作函數(shù),對所讀取的字符串進(jìn)行分離,識別和處理。對GPS信息進(jìn)行讀取、處理、顯示、存儲,以及回放的程序,與IMU相似,只是在數(shù)據(jù)格式方面有些不同,本文不再贅述。
結(jié) 語
利用LabVIEW及現(xiàn)有的實(shí)驗(yàn)室設(shè)備建立了多傳感器信息采集平臺,本平臺通用性能好,免除了對多傳感器信息采集的操作過程中一些煩瑣的工作,采集過程不再需要編寫不同的軟件以適應(yīng)不同傳感器要求;將多傳感器信息在同一界面上顯示,使測量信息更加直觀;形成了統(tǒng)一格式的數(shù)據(jù)存儲文件,有利于多傳感器存儲信息的后處理。 本平臺充分利用了虛擬儀器的靈活性和多輸入多輸出的特點(diǎn),將計(jì)算機(jī)、多傳感器、LabVIEW軟件結(jié)合起來,構(gòu)成了一個(gè)虛擬儀器系統(tǒng),實(shí)現(xiàn)對多傳感器信息的測控,為將來進(jìn)一步研究利用虛擬儀器測控多傳感器信息以及進(jìn)行多傳感器信息融合奠定了基礎(chǔ)。
來源:賽斯維傳感器網(wǎng)
其他特價(jià)產(chǎn)品
1LG6253-4MA91-ZSIEMENS高壓液壓站
1LA9163-4KA91-ZSIEMENS高壓液壓站
1PH7184-7NF000AJ3-ZSIEMENS
1LA9183-2WA61-ZSIEMENS
1LA9090-2KA11-ZSIEMENS
1PH7186-7ND300AA3SIEMENS
1LA7096-4AA91SIEMENS
1LG4207-4AA60SIEMENS
1FT6132-6SB71-1DG0SIEMENS
1LE1001-1CA03-4AA4SIEMENS
1LE10011DA433JZ6ZSIEMENS
1LG4316-4AA66-ZSIEMENS
1LA5186-4AA66-Z SIEMENS
主營產(chǎn)品:Sick傳感器,Sick激光掃描儀 ,Sick安全光柵 ,
sick激光掃描儀 ,編碼器 ,安全光柵 ,安全繼電器 ,CAPTRON觸摸開關(guān)
,菲尼克斯PHOENIX CONTACT
進(jìn)入上海遠(yuǎn)康自動(dòng)化淘寶店鋪